Autonomous Weed Removal via Drones
I created an autonomous weed removal system for farmlands using drones. This was originally for a science fair, the Santa Clara Regional Synopsys Science & Technology Fair Competition. My passion for this project led me to continue this further by co-writing a research paper with a friend, advised by Professor Armin Moghadam at San Jose State University. (Bio: https://www.sjsu.edu/avtech/about-us/etech-faculty/dr-moghadam.php)
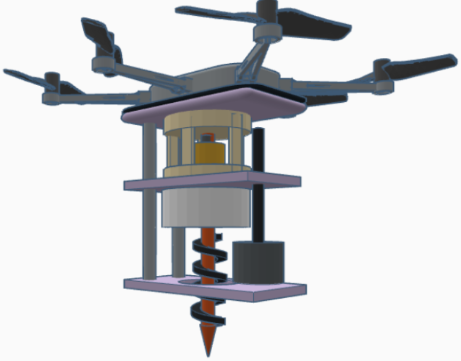
We split the creation of this project into two parts: hardware and software, as attaching the removal mechanism to a drone was not possible at the time.
Research Paper Abstract
“In today’s world, there are many weed removal options for farmers to implement in their farmlands. However, in many countries, this is a large issue as they don’t have the resources, time, and money to keep up with their crop yield, where weeds will bring problems to their farm. To resolve these issues, we devised a novel method—an autonomous weed removal system consisting of an elevator-drill system connected to a drone powered with Machine Learning (ML). This potential strategy, granting a 77% accuracy rate, proved the viability of our system and we believe that with a fine-tuned model and more advanced drone technology, this method can be competitive with other autonomous weed removal systems. Our paper aims to discuss the outcomes, both positive and negative, of several machines already used today. In doing so, we will highlight how these findings demonstrate a way for addressing the flaws in these world-wide problems through our weed removal method. “
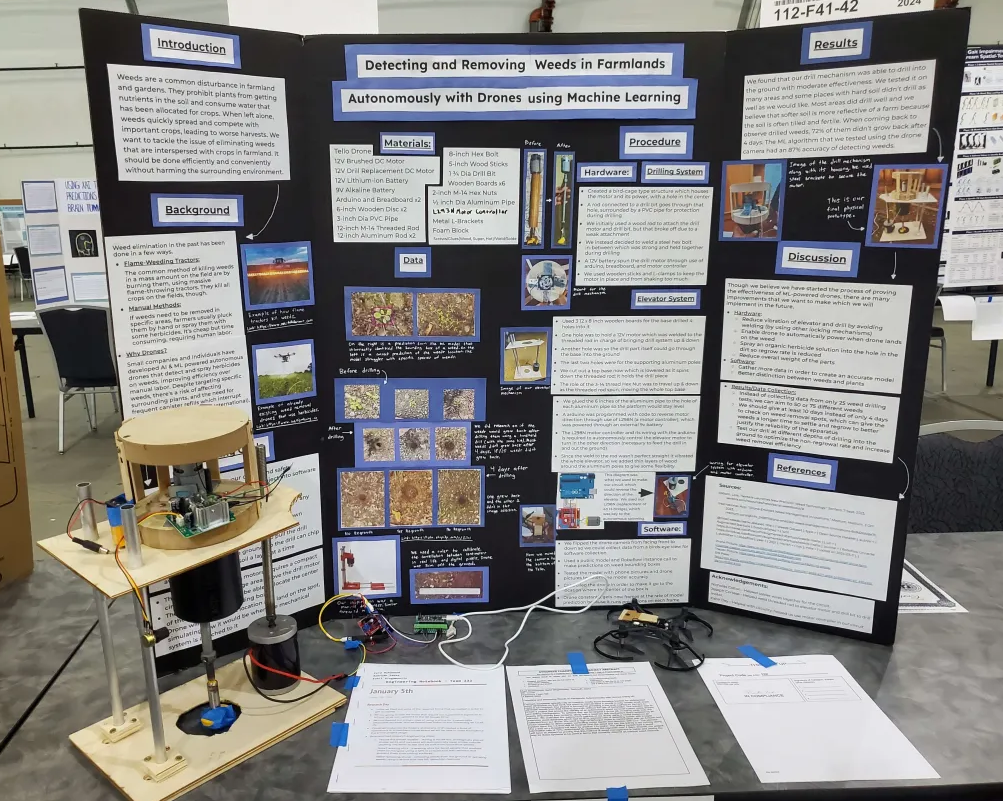
Display board at the science fair
(March 2024)